本文主要讲解关于【研发日记】Matlab/Simulink技能解锁(七)——两种复数移相算法相关内容,让我们来一起学习下吧!

复数移相,也称为复数相位旋转,就是在原有复数的基础上,不改变模数,只把相位角做一定的偏移。
文章目录
前言
三角函数移相
复数乘法移相
分析和应用
总结
前言
见《【研发日记】Matlab/Simulink技能解锁(二)——在Function编辑窗口Debug》
见《【研发日记】Matlab/Simulink技能解锁(三)——在Stateflow编辑窗口Debug》
见《【研发日记】Matlab/Simulink技能解锁(四)——在Simulink Debugger窗口调试》
见《【研发日记】Matlab/Simulink技能解锁(五)——七个Simulink布线技巧》
见《【研发日记】Matlab/Simulink技能解锁(六)——六种Simulink模型架构》
三角函数移相
三角函数移相法,是利用模数和实部虚部之间的三角函数关系,从原复数求得新复数。在Simulink中建立的移相函数,如下所示:
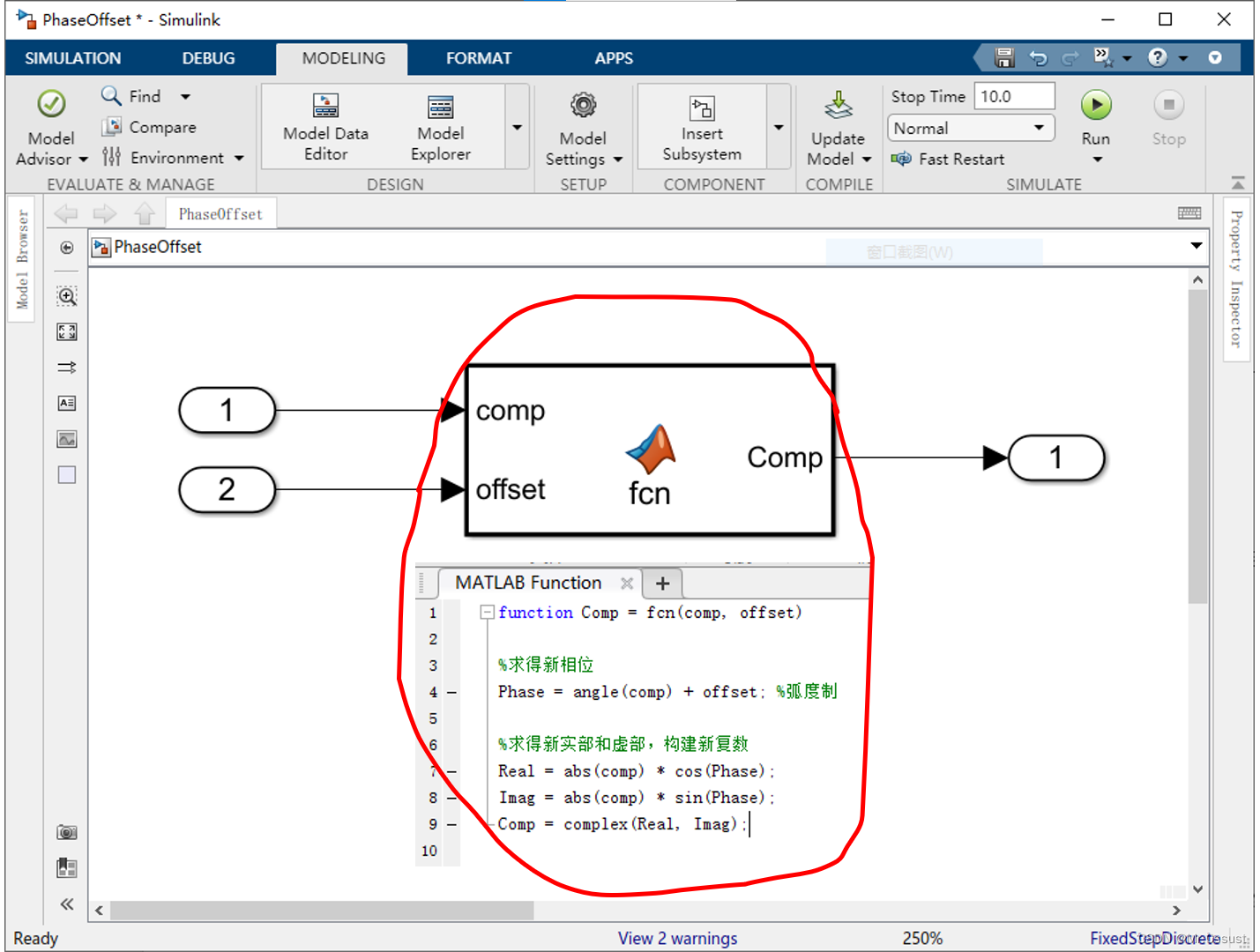
Tips: offset的范围在-π到π之间,输入接口要做溢出处理。
上述模型编译出来的代码,如下所示:
#include "PhaseOffset.h"
#include "PhaseOffset_private.h"
/* External inputs (root inport signals with default storage) */
ExtU_PhaseOffset_T PhaseOffset_U;
/* External outputs (root outports fed by signals with default storage) */
ExtY_PhaseOffset_T PhaseOffset_Y;
/* Real-time model */
static RT_MODEL_PhaseOffset_T PhaseOffset_M_;
RT_MODEL_PhaseOffset_T *const PhaseOffset_M = &PhaseOffset_M_;
real_T rt_atan2d_snf(real_T u0, real_T u1)
{
real_T y;
int32_T u0_0;
int32_T u1_0;
if (rtIsNaN(u0) || rtIsNaN(u1)) {
y = (rtNaN);
} else if (rtIsInf(u0) && rtIsInf(u1)) {
if (u0 > 0.0) {
u0_0 = 1;
} else {
u0_0 = -1;
}
if (u1 > 0.0) {
u1_0 = 1;
} else {
u1_0 = -1;
}
y = atan2(u0_0, u1_0);
} else if (u1 == 0.0) {
if (u0 > 0.0) {
y = RT_PI / 2.0;
} else if (u0 < 0.0) {
y = -(RT_PI / 2.0);
} else {
y = 0.0;
}
} else {
y = atan2(u0, u1);
}
return y;
}
/* Model step function */
void PhaseOffset_step(void)
{
real_T Out1_tmp;
real_T Phase;
/* MATLAB Function: '<Root>/MATLAB Function' incorporates:
* Inport: '<Root>/In1'
* Inport: '<Root>/In2'
*/
Phase = rt_atan2d_snf(0.0, PhaseOffset_U.In1) + PhaseOffset_U.In2;
Out1_tmp = fabs(PhaseOffset_U.In1);
/* Outport: '<Root>/Out1' incorporates:
* MATLAB Function: '<Root>/MATLAB Function'
*/
PhaseOffset_Y.Out1.re = Out1_tmp * cos(Phase);
PhaseOffset_Y.Out1.im = Out1_tmp * sin(Phase);
}
/* Model initialize function */
void PhaseOffset_initialize(void)
{
/* Registration code */
/* initialize non-finites */
rt_InitInfAndNaN(sizeof(real_T));
}
/* Model terminate function */
void PhaseOffset_terminate(void)
{
/* (no terminate code required) */
}
复数乘法移相
当一个复数乘以另一个相位角为θ的复数时,那么前者的相位就会偏移θ。如果后者是单位复数(模数为1),那么前者的模数不变,只跟随θ旋转相位角。用这种算法建立的移相函数如下所示:
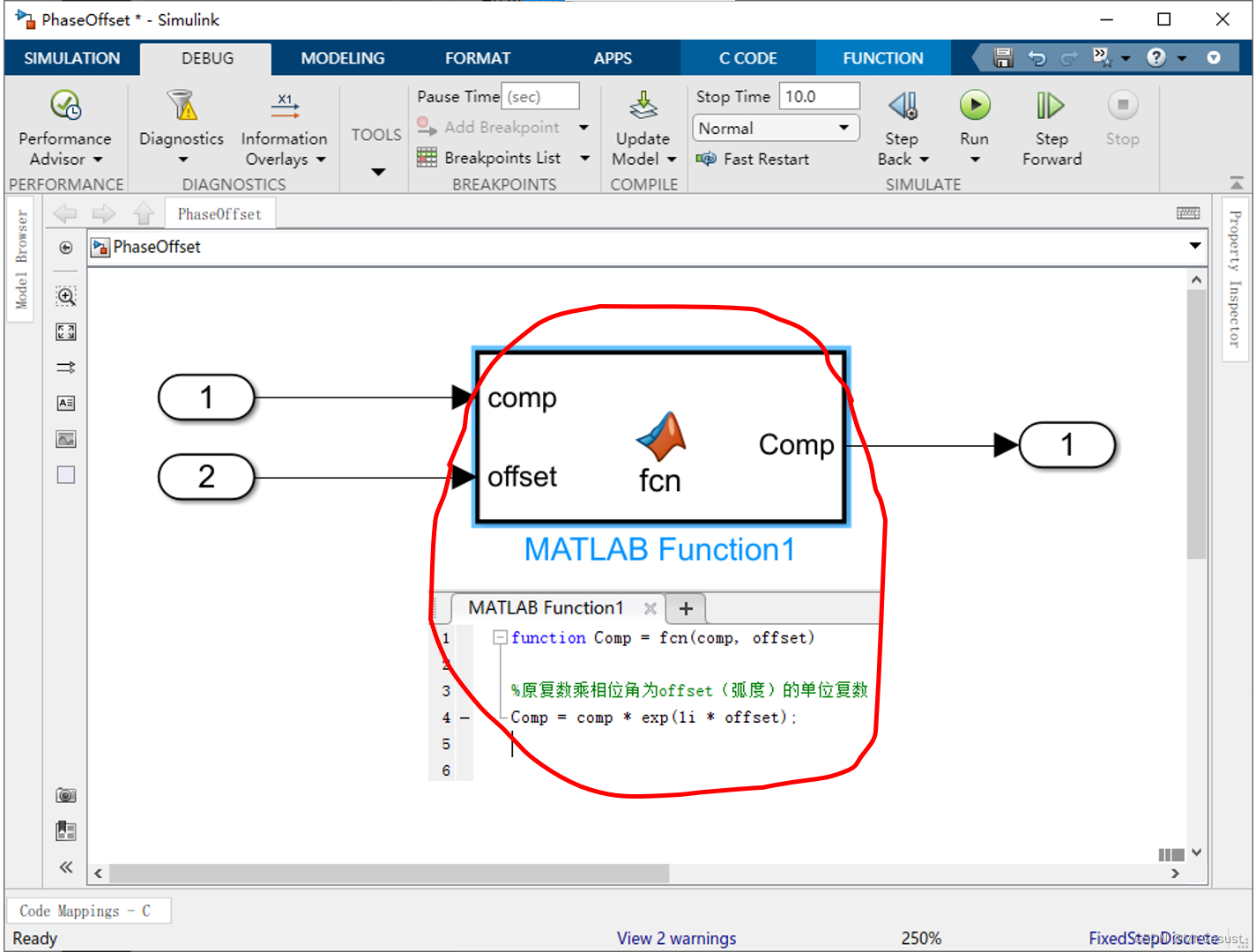
Tips:exp(1i * offset) = cos(offset) + sin(offset)i。
上述模型编译出来的代码,如下所示:
#include "PhaseOffset.h"
#include "PhaseOffset_private.h"
/* External inputs (root inport signals with default storage) */
ExtU_PhaseOffset_T PhaseOffset_U;
/* External outputs (root outports fed by signals with default storage) */
ExtY_PhaseOffset_T PhaseOffset_Y;
/* Real-time model */
static RT_MODEL_PhaseOffset_T PhaseOffset_M_;
RT_MODEL_PhaseOffset_T *const PhaseOffset_M = &PhaseOffset_M_;
/* Model step function */
void PhaseOffset_step(void)
{
real_T r;
real_T y_re;
/* MATLAB Function: '<Root>/MATLAB Function1' incorporates:
* Inport: '<Root>/In2'
*/
if (PhaseOffset_U.In2 == 0.0) {
y_re = exp(PhaseOffset_U.In2 * 0.0);
r = 0.0;
} else {
r = exp(PhaseOffset_U.In2 * 0.0 / 2.0);
y_re = r * cos(PhaseOffset_U.In2) * r;
r *= r * sin(PhaseOffset_U.In2);
}
/* Outport: '<Root>/Out1' incorporates:
* Inport: '<Root>/In1'
* MATLAB Function: '<Root>/MATLAB Function1'
*/
PhaseOffset_Y.Out1.re = PhaseOffset_U.In1 * y_re;
PhaseOffset_Y.Out1.im = PhaseOffset_U.In1 * r;
}
/* Model initialize function */
void PhaseOffset_initialize(void)
{
/* (no initialization code required) */
}
/* Model terminate function */
void PhaseOffset_terminate(void)
{
/* (no terminate code required) */
}分析和应用
复数移相在嵌入式软件开发中应用非常广泛,尤其是在电源设计和电机控制领域。上述两种移相算法都能实现相同的功能,但是具体运算过程略有差别,可以从两者的C代码中进行分辨。
三角函数移相主要用到的运算是arctan()、abs()、cos()、sin()等,复数乘法移相主要用到的运算是e^()、cos()、sin()等,其中的abs()实质是平方和开方,e^()也是n次方,所以底层运算基本上都是一样的。
在matlab函数中,复数乘法移相的运算步骤更加精简。在底层C代码中,三角函数移相的运算步骤更加精简。
综上,可以根据自己的开发理念选取合适的移相算法。如果注重运行高效,就选择三角函数移相。如果注重开发代码精炼的,就选择复数乘法移相。
总结
以上就是本人在研发中使用Simulink开发复数移相算法时,一些个人理解和分析的总结,主要介绍了两种移相算法的工作原理,展示了算法运行的效果,并分析了这两种算法的特点和适用场景。
后续还会分享另外几个最近解锁的Matlab/Simulink新技能,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
另外,上述例程使用的Demo工程,可以到笔者的主页查找和下载。
版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
以上就是关于【研发日记】Matlab/Simulink技能解锁(七)——两种复数移相算法相关的全部内容,希望对你有帮助。欢迎持续关注程序员导航网,学习愉快哦!